




Die Kombination aus Evolventen-Schnecke und Evolventen-Stirnrad findet breite Anwendung in Getrieben mit geringer Leistung. Diese Getriebeart ist relativ einfach zu konstruieren und herzustellen. Bei der Fertigung ist sie auch dann eine gute Wahl, wenn die Bauteilgenauigkeit etwas geringer ausfällt oder die Anforderungen an das Übersetzungsverhältnis nicht allzu streng sind.
Derzeit ist diese Art von Übertragungspaar nicht in den allgemeinen Konstruktionsdaten enthalten, da die Theorie dazu noch nicht vollständig ausgereift ist.
Dieses Zahnradpaar ist ein typisches Punktkontakt-Getriebepaar. Mikroskopisch betrachtet ist die lokale Spannung hoch und der Wirkungsgrad gering. Glücklicherweise ist das Übertragungsdrehmoment gering und die Anforderungen an den Wirkungsgrad niedrig. Daher ist es gut vermarktbar. Diese Konstruktion vermeidet verschiedene Probleme, die bei der Herstellung und Montage von Schneckengetrieben auftreten.
In diesem Beitrag geht es hauptsächlich um die Darstellung eines solchen Kontaktpaares, das sich in einem sehr kleinen Bereich entlang der Normalenrichtung bewegt, indem eine Animation in Bewegungsrichtung des Kontaktpunkts verwendet wird.
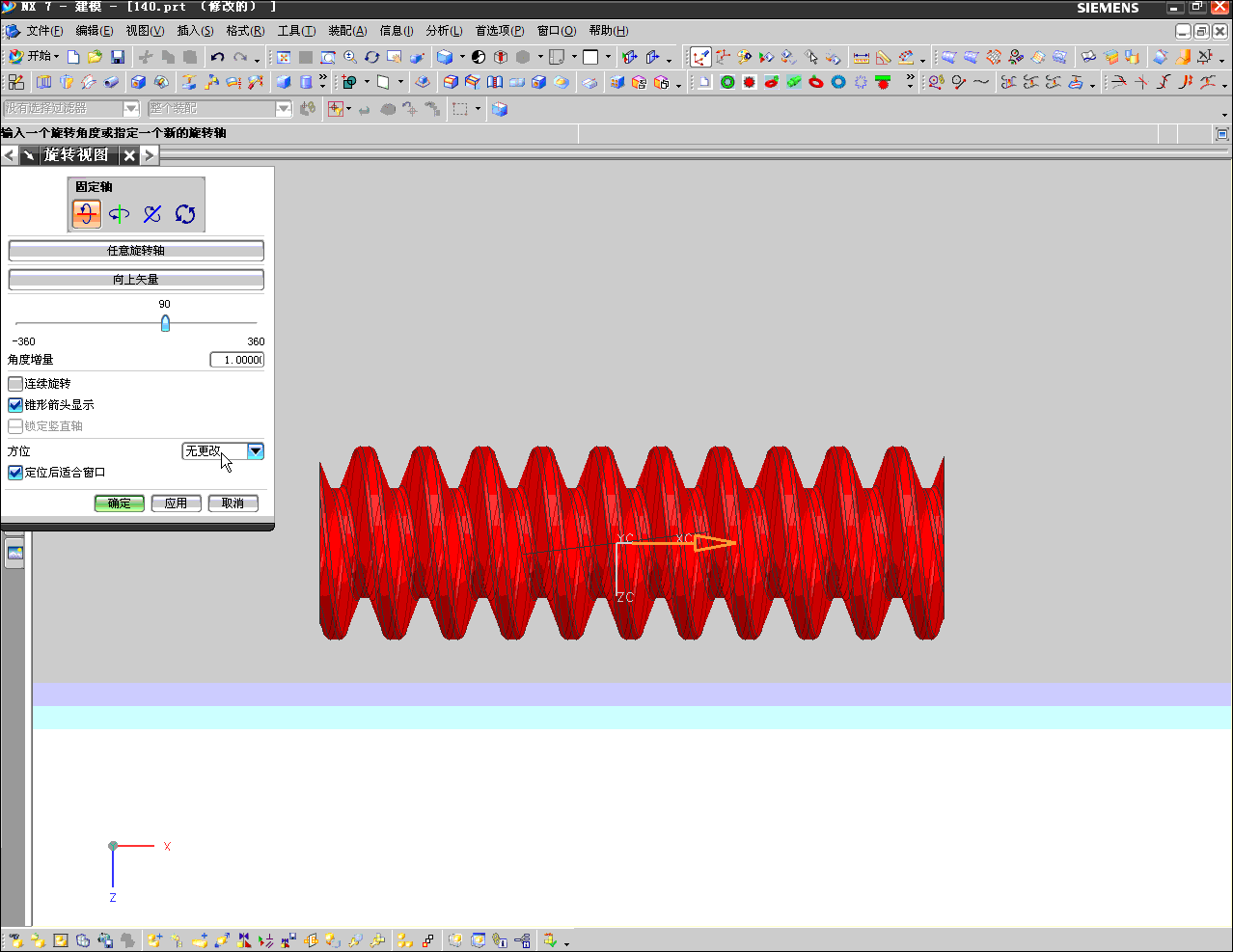
Erstellen Sie eine Ebene im mittleren Bereich des Zahnradpaares auf der Zeichnung und bearbeiten Sie diese in der Zeichnung mit einer durchscheinenden und kontrastierenden Farbe. Lassen Sie die Schnecke dann um die vertikale Linie vom Zahnradmittelpunkt zur Schnecke, die sich an der Position der Normalenebene befindet, mit einem ansteigenden Winkel rotieren, wie in der folgenden Abbildung dargestellt:
Nach der Bearbeitung wird das Übertragungspaar, bei dem die Eingriffsmarken überprüft werden müssen, in einer Kontrastfarbe eingefärbt, wobei eines davon transparent bleibt, sodass die Bewegung der Eingriffsposition während der gesamten dynamischen Simulation deutlich sichtbar ist. Siehe unten:
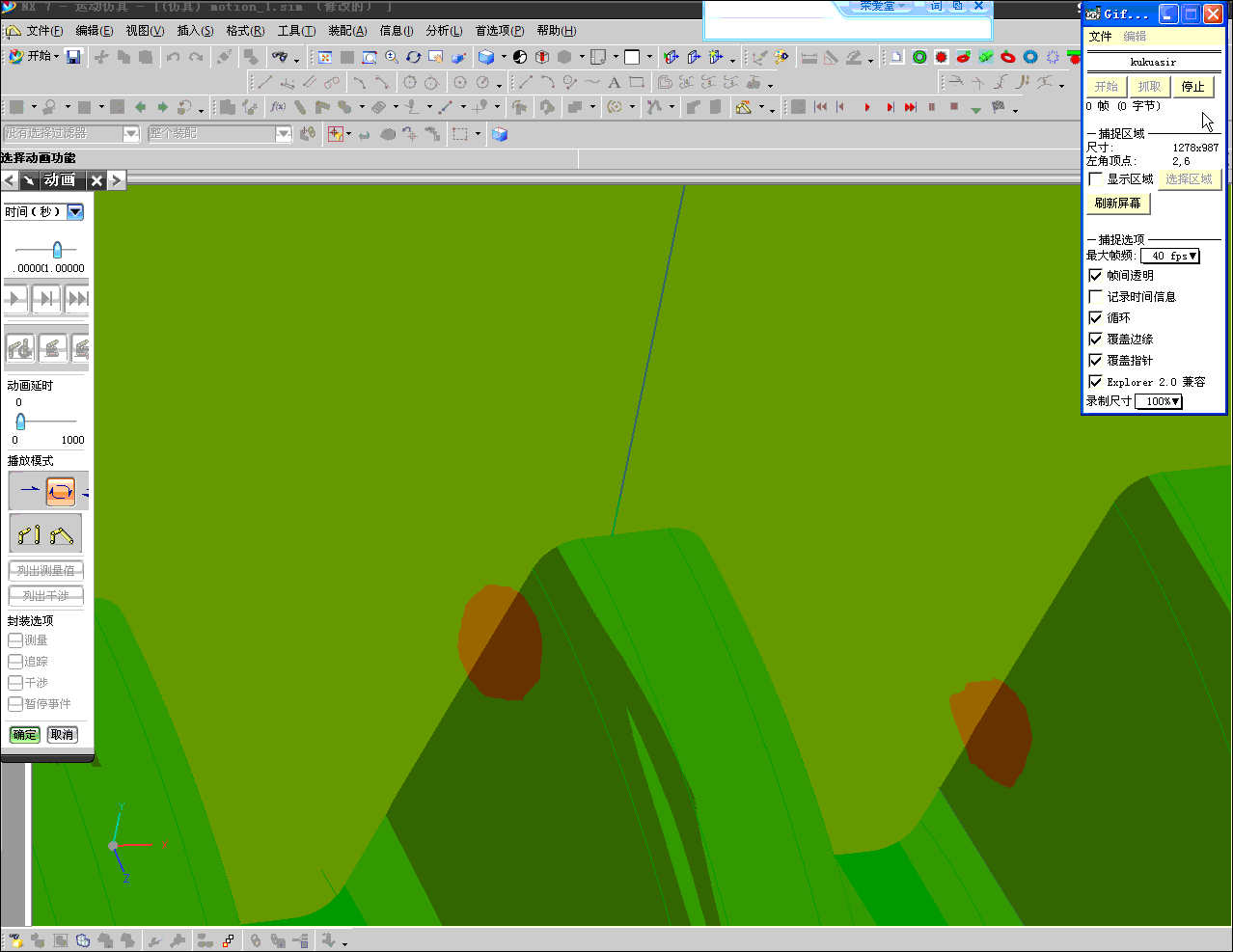
Während der Bewegung des Verzahnungskontaktpunkts mit deutlich kontrastierender Farbe kann man erkennen, dass er die normale Platte durchdringt.
Im obigen Beispiel berechnete Datensätze:
Vorläufiges Berechnungsprotokoll eines Evolventenschneckengetriebes mit Schrägverzahnung
Eingabedaten
Normalmodul: 6, Schneckenradkreisdurchmesser: 5, Schneckenkopfnummer: 1, Anzahl der Schrägverzahnungszähne: 40
Normaler Eingriffswinkel: 20° Voreinstellung des Schrägverzahnungswinkels: 6,89210257934639
Berechnungsdaten
Normalmodul: sechs
Axialmodul: sechshundertvier Billionen dreihundertsiebenundsechzig Milliarden zweihundertdreiundzwanzig Millionen neunzehntausendfünfunddreißig
Steigwinkel des Gewindes: 6,89210257934639
Spiralrichtung: Schnecke und Schrägzahnrad verlaufen in die gleiche Richtung
Mittelpunktabstand bei Nullverschiebung: 14,5873444603807
Mittenabstand des Eingangsübertragungspaares: 14,75
Äquivalente Anzahl der Schraubenzähne: 8,27311576399391
axialer Druckwinkel der Schnecke: 20,1339195068419
Radialer Durchbiegungskoeffizient des Schrägverzahnungsrades: zweitausendsiebenhundertelf
Schneckenhelixwinkel: 83,1078974206537
Grundlegende Parameter des Wurms 83.10789742065361
Hauptdurchmesser des Wurms: 6,2; Nebendurchmesser des Wurms: 3,5; Anzahl der Wurmzähne: 1
Normalmodul der Schnecke: 6, Normaldruckwinkel der Schnecke: 20, Durchmesser des Teilkreises der Schnecke: 5
Radialer Verschiebungskoeffizient der Schnecke: 0 Durchmesser des Schneckengrundkreises: 1,56559093858108
Schneckenendmodul: 5 Schneckenaxialmodul: sechshundertvier Billionen dreihundertsiebenundsechzig Milliarden zweihundertdreiundzwanzig Millionen neunzehntausendfünfunddreißig
Axialer Schneckendruckwinkel: 20,1339195068419 Schneckenstirnflächendruckwinkel: 71,752752179164
Normale Zahndicke des Wurm-Indexierkreises: 942477796076937; Messzahnhöhe des Wurm-Indexierkreises: sechs
Steigungswinkel des Schneckenindexkreises: 6,89210257934639 Steigungswinkel des Schneckenindexkreises: 83,1078974206537
Effektive Zahnlänge des Wurms: 25
Schneckenleitung (axial): 1,89867562790706
Grundlegende Parameter von Stirnrädern
Hauptdurchmesser des Schrägzahnrads: 25,7 mm; Kerndurchmesser des Schrägzahnrads: 23 mm; Zähnezahl des Schrägzahnrads: 40
Normalmodul des Schrägzahnrads: 6; Normaleingriffswinkel des Schrägzahnrads: 20°; Modifikationskoeffizient des Schrägzahnrads: 2711
Teilkreisdurchmesser des Schrägverzahnungsgetriebes: 24,1746889207614 Durchmesser des Grundkreises des Schrägverzahnungsgetriebes: 22,69738911811
Modul der Stirnfläche des Schrägverzahnungsrades: 604367223019035 Eingriffswinkel der Stirnfläche des Schrägverzahnungsrades: 20,1339195068419
Schrägungswinkel des Teilkreises des Schrägverzahnungsgetriebes: 6,89210257934639 Schrägverzahnungsbreite: 10
Schrägverzahnung (axial) Steigung: 628,318530717958
Anzahl der Zähne über die gemeinsame Normalenlinie des Schrägzahnrads: 5; Nennwert der gemeinsamen Normalenlinie des Schrägzahnrads: 8,42519
Anzahl der Zähne über die gemeinsame Normalenachse des Schrägzahnrads: 6; Nennwert der gemeinsamen Normalenachse des Schrägzahnrads: 10,19647
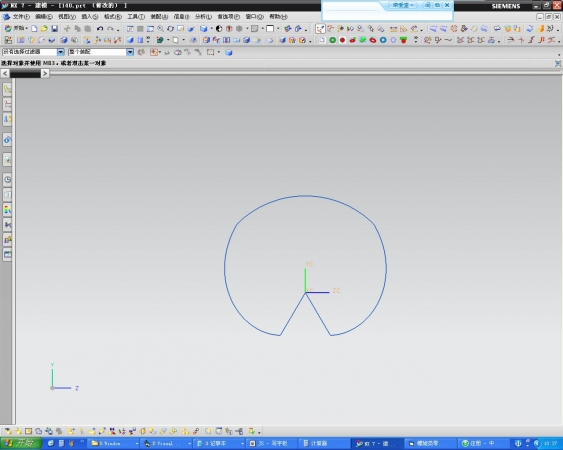
Endflächen-Evolventenliniendiagramm zur Modellierung der Evolventenwurm-Form:
Veröffentlichungsdatum: 11. Juni 2022