




GleasonSpiralverzahnungGleason-Kegelräder sind eine spezielle Art von Kegelrädern, die zur Kraftübertragung zwischen sich kreuzenden Wellen, üblicherweise in einem 90°-Winkel, dienen. Das Besondere am Gleason-System ist seine einzigartige Zahngeometrie und sein Herstellungsverfahren, die für einen ruhigen Lauf, ein hohes Drehmoment und einen leisen Betrieb sorgen. Diese Zahnräder finden breite Anwendung in Getrieben der Automobil-, Industrie- und Luftfahrtbranche, wo Zuverlässigkeit und Präzision entscheidend sind.
Das Gleason-System wurde entwickelt, um die geraden undZerol-KegelräderDurch die Einführung einer gebogenen, spiralförmigen Verzahnung wird ein sanfter Eingriff der Zähne ermöglicht, wodurch Geräusche und Vibrationen deutlich reduziert werden. Gleichzeitig werden höhere Drehzahlen und eine höhere Belastbarkeit erzielt. Die Konstruktion verbessert zudem das Kontaktverhältnis und die Oberflächenfestigkeit und gewährleistet so eine effiziente Kraftübertragung auch unter hohen oder dynamischen Belastungen.
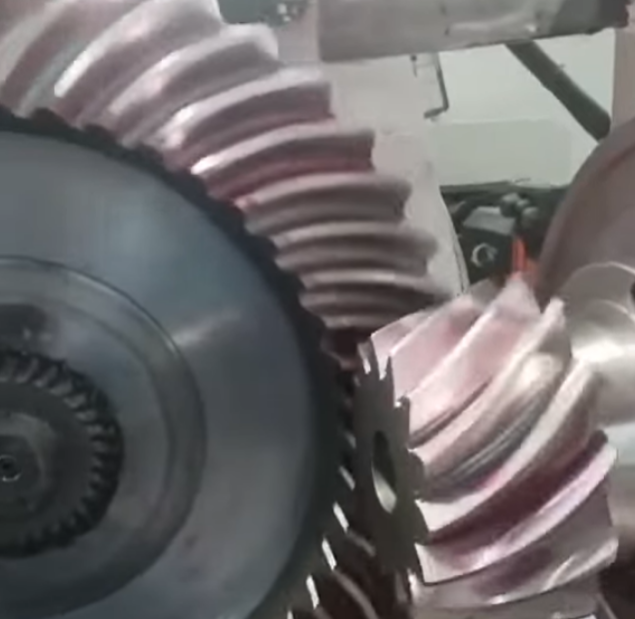
Jedes Gleason-Spiralkegelradpaar besteht aus einem Ritzel und einem passenden Zahnrad mit exakt aufeinander abgestimmter Geometrie. Der Herstellungsprozess ist hochspezialisiert. Er beginnt mit dem Schmieden oder Präzisionsgießen von Rohlingen aus legiertem Stahl, beispielsweise 18CrNiMo7-6. Anschließend erfolgt die Vorbearbeitung, das Wälzfräsen oder das Formfräsen, um die Grundform des Zahnrads zu erzeugen. Moderne Verfahren wie die 5-Achs-Bearbeitung, das Schälen und das Hartschneiden gewährleisten eine hohe Maßgenauigkeit und eine optimale Oberflächengüte. Nach der Wärmebehandlung, beispielsweise dem Aufkohlen (58–60 HRC), werden die Zahnräder geläppt oder geschliffen, um einen perfekten Eingriff zwischen Ritzel und Zahnrad zu erzielen.
Die Geometrie von Gleason-Spiralkegelrädern wird durch mehrere kritische Parameter definiert: Spiralwinkel, Eingriffswinkel, Teilkegelabstand und Zahnbreite. Diese Parameter werden präzise berechnet, um korrekte Zahneingriffsformen und Lastverteilung zu gewährleisten. Bei der Endprüfung wird mithilfe von Werkzeugen wie der Koordinatenmessmaschine (KMM) und der Zahnkontaktanalyse (ZKA) überprüft, ob der Zahnradsatz die geforderte Präzisionsklasse nach DIN 6 oder ISO 1328-1 erfüllt.

Im Betrieb: Gleason-SpiraleKegelräderSie bieten hohe Effizienz und stabile Leistung auch unter anspruchsvollen Bedingungen. Die gebogenen Zähne gewährleisten einen kontinuierlichen Kontakt und reduzieren so Spannungsspitzen und Verschleiß. Dadurch eignen sie sich ideal für Pkw-Differentiale, Lkw-Getriebe, schwere Maschinen, Schiffsantriebe und Elektrowerkzeuge. Die Möglichkeit, Zahngeometrie und Montageabstand individuell anzupassen, erlaubt es Ingenieuren zudem, die Konstruktion hinsichtlich Drehmoment, Drehzahl und Platzbedarf zu optimieren.
Gleason-Spiralkegelrad – wichtige Berechnungstabelle
| Artikel | Formel / Ausdruck | Variablen / Notizen |
|---|---|---|
| Eingabeparameter | (z_1, z_2, m_n, alpha_n, Sigma, b, T) | Ritzel-/Zahnradzähne (z); Normalmodul (m_n); Normaleingriffswinkel (\alpha_n); Wellenwinkel (\Sigma); Zahnbreite (b); übertragenes Drehmoment (T). |
| Referenzdurchmesser (mittlerer Durchmesser) | (d_i = z_i , m_n) | i = 1 (Ritzel), 2 (Zahnrad). Mittlerer/Referenzdurchmesser im Normalquerschnitt. |
| Neigungswinkel (Kegelwinkel) | (\delta_1,\ \delta_2) so dass (\delta_1+\delta_2=\Sigma) und (\dfrac{\sin\delta_1}{d_1}=\dfrac{\sin\delta_2}{d_2}) | Ermitteln Sie die Kegelwinkel, die mit den Zahnproportionen und dem Wellenwinkel übereinstimmen. |
| Kegelabstand (Abstand des Scheitelpunkts) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | Abstand von der Kegelspitze zum Teilkreis, gemessen entlang der Mantellinie. |
| Kreisförmiger Steigungswinkel (normal) | (p_n = \pi m_n) | Lineare Steigung im Normalabschnitt. |
| Quermodul (ca.) | (m_t = \dfrac{m_n}{\cos\beta_n}) | (\beta_n) = normaler Spiralwinkel; transformiert je nach Bedarf zwischen Normal- und Querschnitten. |
| Spiralwinkel (Mittelwert-/Transversalverhältnis) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | (\delta_m) = mittlerer Kegelwinkel; Transformationen zwischen Normal-, Transversal- und mittlerem Spiralwinkel verwenden. |
| Empfehlung zur Gesichtsbreite | (b = k_b , m_n) | (k_b) wird üblicherweise je nach Größe und Anwendung zwischen 8 und 20 gewählt; den genauen Wert entnehmen Sie bitte der Konstruktionspraxis. |
| Nachtrag (Mittelwert) | (a \approx m_n) | Standardmäßige Annäherung an die volle Zahnhöhe; für präzise Werte verwenden Sie exakte Zahnverhältnistabellen. |
| Außendurchmesser (Spitze) | (d_{o,i} = d_i + 2a) | i = 1,2 |
| Wurzeldurchmesser | (d_{f,i} = d_i – 2h_f) | (h_f) = Fußpunkt (aus den Proportionen des Zahnradsystems). |
| Kreisförmige Zahndicke (ca.) | (s \approx \dfrac{\pi m_n}{2}) | Für die Geometrie der Fasen ist zur Gewährleistung der Genauigkeit die korrigierte Dicke aus Zahntabellen zu verwenden. |
| Tangentialkraft am Teilkreis | (F_t = \dfrac{2T}{d_p}) | (T) = Drehmoment; (d_p) = Teilkreisdurchmesser (verwenden Sie konsistente Einheiten). |
| Biegespannung (vereinfacht) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = Überlastfaktor, (K_V) = dynamischer Faktor, (Y) = Formfaktor (Biegegeometrie). Für die Bemessung die vollständige AGMA/ISO-Biegegleichung verwenden. |
| Kontaktspannung (Hertz-Typ, vereinfacht) | (\sigma_H = C_H \sqrt{\dfrac{F_t}{d_p , b} \cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1}+\frac{1-\nu_2^2}{E_2}}}) | Geometriekonstante (C_H), Elastizitätsmoduln (E_i, ν_i) und Querkontraktionszahlen (Poissonzahlen) des Materials. Zur Überprüfung die vollständigen Kontaktspannungsgleichungen verwenden. |
| Kontaktverhältnis (allgemein) | (\varepsilon = \dfrac{\text{Aktionsbogen}}{\text{Grundton}}) | Bei Kegelrädern erfolgt die Berechnung anhand der Teilkegelgeometrie und des Spiralwinkels; typischerweise wird sie mithilfe von Zahnradauslegungstabellen oder Software durchgeführt. |
| Virtuelle Anzahl der Zähne | (z_v \approx \dfrac{d}{m_t}) | Nützlich für Kontakt-/Hinterschnittprüfungen; (m_t) = Quermodul. |
| Mindestzahn-/Unterschnittprüfung | Minimale Zahnkonditionierung basierend auf Spiralwinkel, Eingriffswinkel und Zahnproportionen anwenden. | Wenn (z) unterhalb des Mindestwertes liegt, ist ein Hinterschnitt oder die Anfertigung spezieller Werkzeuge erforderlich. |
| Maschinen-/Fräsereinstellungen (Konstruktionsschritt) | Ermitteln Sie die Fräskopfwinkel, die Wiegenrotation und die Indexierung aus der Geometrie des Getriebesystems. | Diese Einstellungen ergeben sich aus der Zahnradgeometrie und dem Schneidsystem; befolgen Sie die Maschinen-/Werkzeugprozedur. |
Moderne Fertigungstechnologien, wie CNC-gesteuerte Kegelradschneid- und Schleifmaschinen, gewährleisten gleichbleibende Qualität und Austauschbarkeit. Durch die Integration von computergestütztem Design (CAD) und Simulation können Hersteller Reverse Engineering und virtuelle Tests vor der eigentlichen Produktion durchführen. Dies minimiert Lieferzeiten und Kosten und verbessert gleichzeitig Präzision und Zuverlässigkeit.

Zusammenfassend lässt sich sagen, dass Gleason-Spiralkegelräder die perfekte Kombination aus fortschrittlicher Geometrie, Materialfestigkeit und Fertigungspräzision darstellen. Ihre Fähigkeit, eine reibungslose, effiziente und dauerhafte Kraftübertragung zu gewährleisten, hat sie zu einer unverzichtbaren Komponente moderner Antriebssysteme gemacht. Ob in der Automobil-, Industrie- oder Luft- und Raumfahrtbranche – diese Zahnräder setzen weiterhin Maßstäbe in puncto Bewegungs- und mechanischer Leistung.
Veröffentlichungsdatum: 24. Oktober 2025